|
|
Ruckig 0.19.4
Motion Generation for Robots and Machines
|
|
|
Ruckig 0.19.4
Motion Generation for Robots and Machines
|
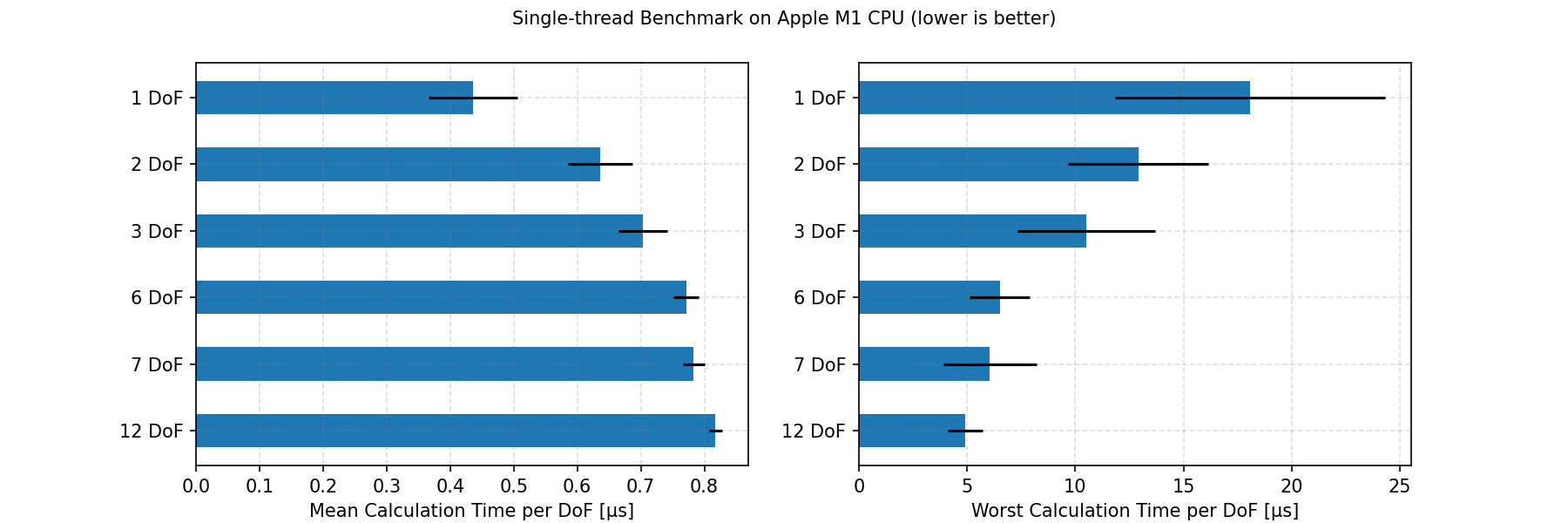
Ruckig guarantees time-optimal durations for state-to-state trajectories; we therefore focus on the computation time as the main metric to benchmark. The figure below gives the computation time per degree of freedom (DoF) for different DoFs and for a common distribution of input parameters. On an Apple M1 chip, the average computation time stays below 1µs per DoF and the worst case computation time stays below 25µs per DoF. For example, Ruckig is well-suited for control cycles as low as 50µs for Cartesian systems or 100µs for 6-axes robot arms.
Compared to the Community Version, the Ruckig Pro Version is around 20% faster on average and 40% faster in the worst case. Besides, the Community Version has known numeric stability as well as robustness issues that are resolved in the Pro Version. We view the Community Version as the final state of an academic project; for a maintained and production-ready codebase we refer to the Pro Version.
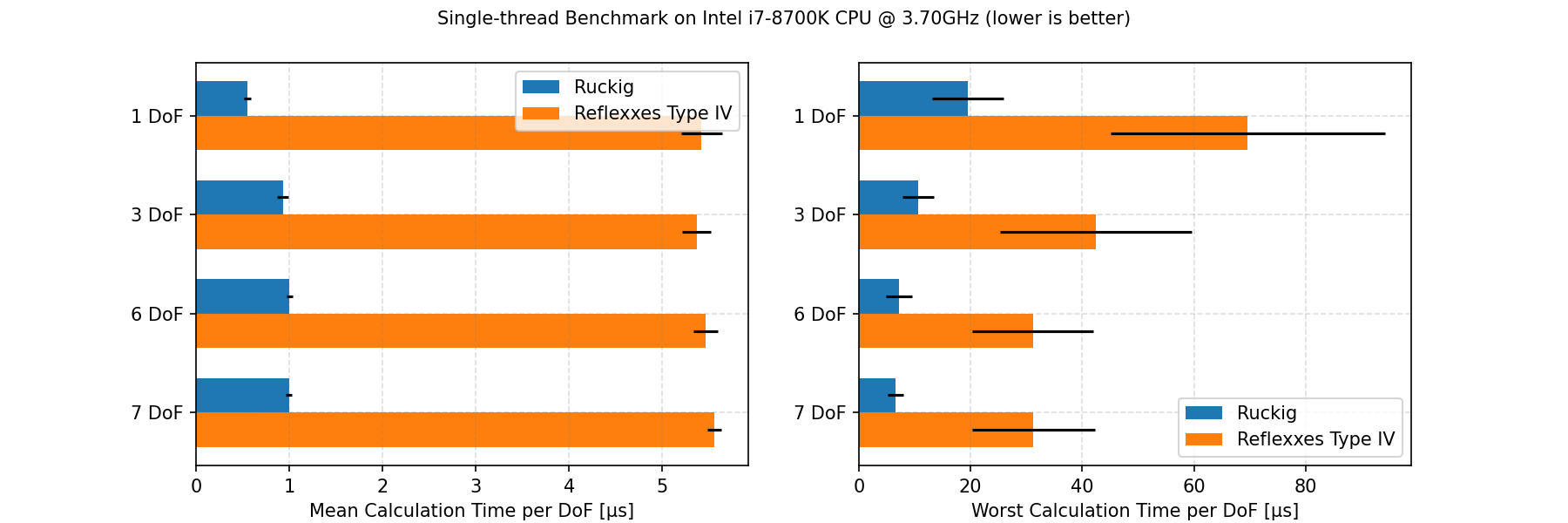
Compared to Reflexxes Type IV, Ruckig is over four times faster for state-to-state motions. The Ruckig Community Version is in general a more powerful and open-source alternative to the Reflexxes libraries. In fact, Ruckig is the first Type V trajectory generator for arbitrary target states and even supports directional velocity and acceleration limits, while also being faster on top.
For trajectories with intermediate waypoints, both the trajectory duration and the computation time are important metrics. Ruckig allows to balance these two metrics using the exposed step parameters; we here just use the default settings.
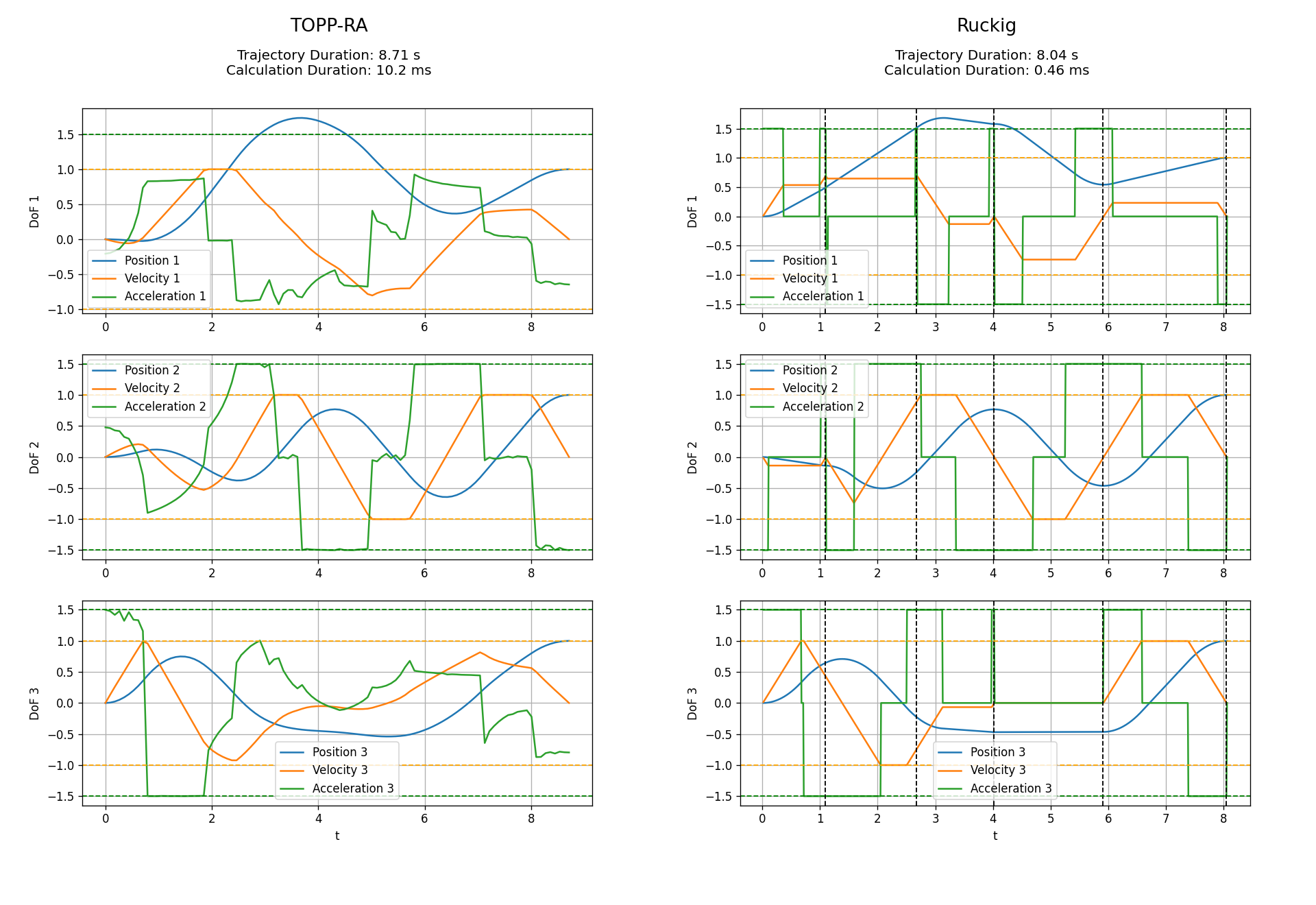
toppra is a widely-used state-of-the-art library for robotic motion planning. The key algorithmic differences are: toppra separates path geometry from time parametrization, while Ruckig computes them jointly. This allows Ruckig to find shorter trajectories that respect the same kinematic limits. Ruckig uses analytical profiles instead of a numerical grid to represent the trajectory, resulting in smoother position, velocity, and acceleration profiles and faster computation time. In contrast, Ruckig also respects jerk limits and is real-time capable.
As a qualitative example, the figure below shows a real-world trajectory with three degrees of freedom. Ruckig is able to improve the trajectory duration by around 10% with smoother profiles in comparison to toppra.
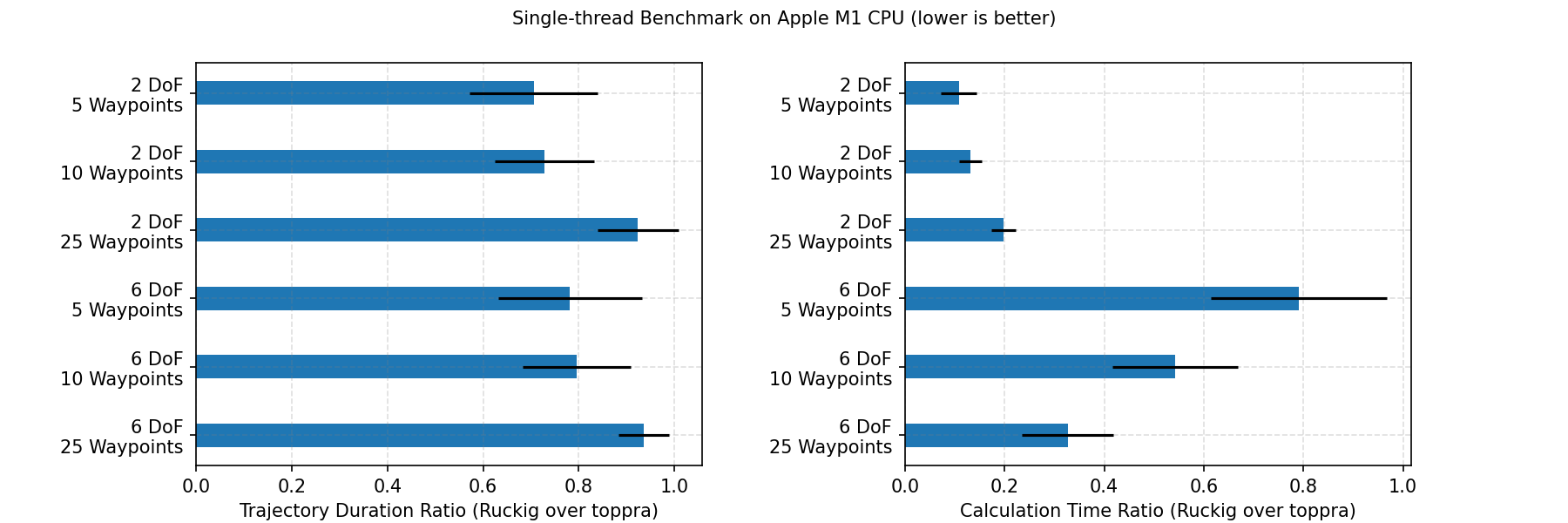
For a quantitative comparison, we generate a distribution of intermediate positions that are passed through precisely. As toppra doesn't support jerk limits, we set a high but finite jerk limit for Ruckig instead. Ruckig still improves the trajectory duration by 10 to 20% over toppra, while reducing the computation time by 20 to 90% depending on DoFs and the number of waypoints.
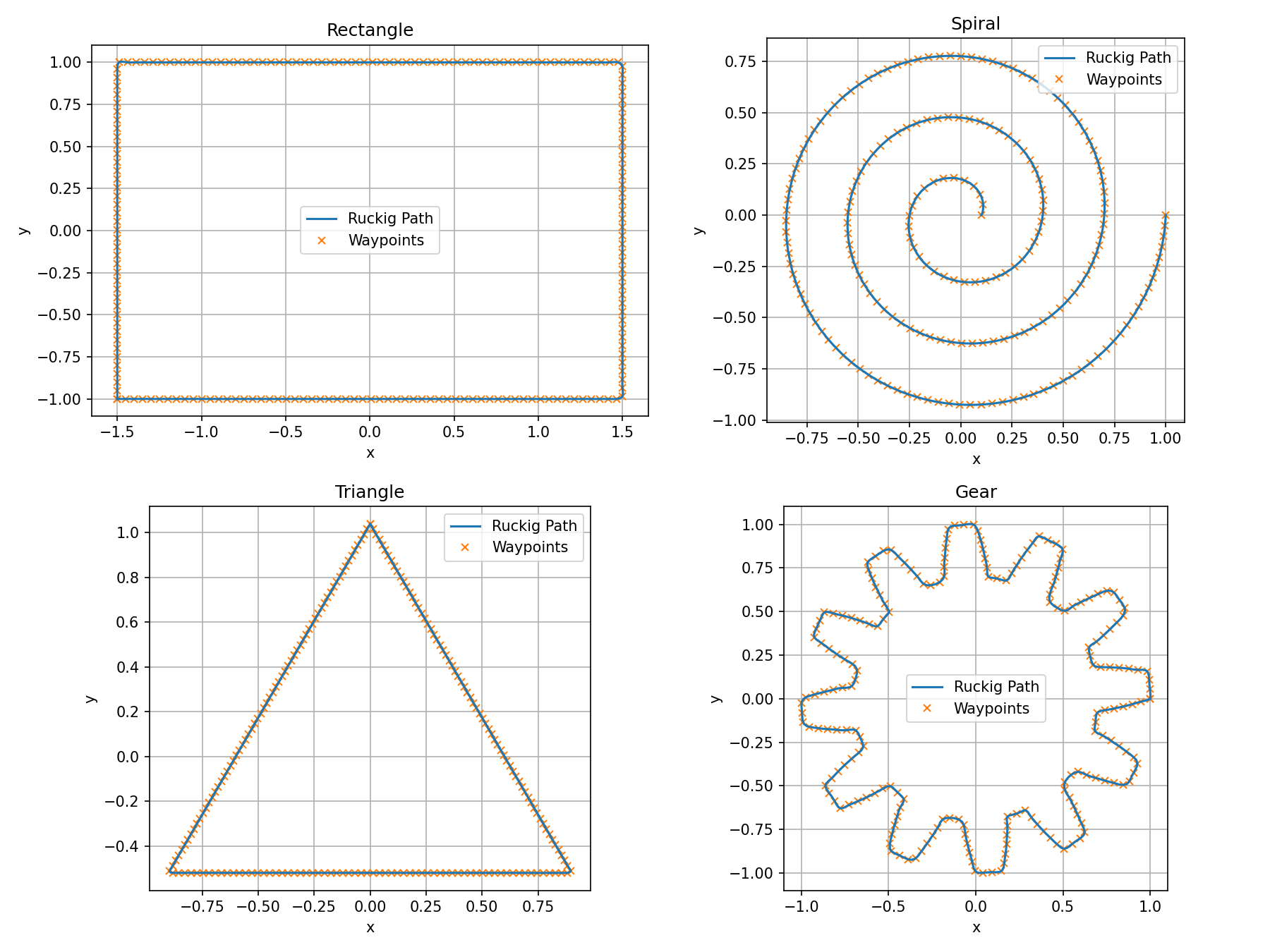
Intermediate waypoints can be used to follow a geometric path approximately. Below, Ruckig tracks a 2D path with 200 evenly-spaced waypoints. The resulting time-parametrized trajectory can be sampled at an arbitrary control rate and is guaranteed to respect the configured velocity, acceleration, and jerk limits throughout.