from copy import copy
from ruckig import InputParameter, OutputParameter, Result, Ruckig
if __name__ == '__main__':
ruckig = Ruckig(3, 0.01)
inp = InputParameter(3)
out = OutputParameter(3)
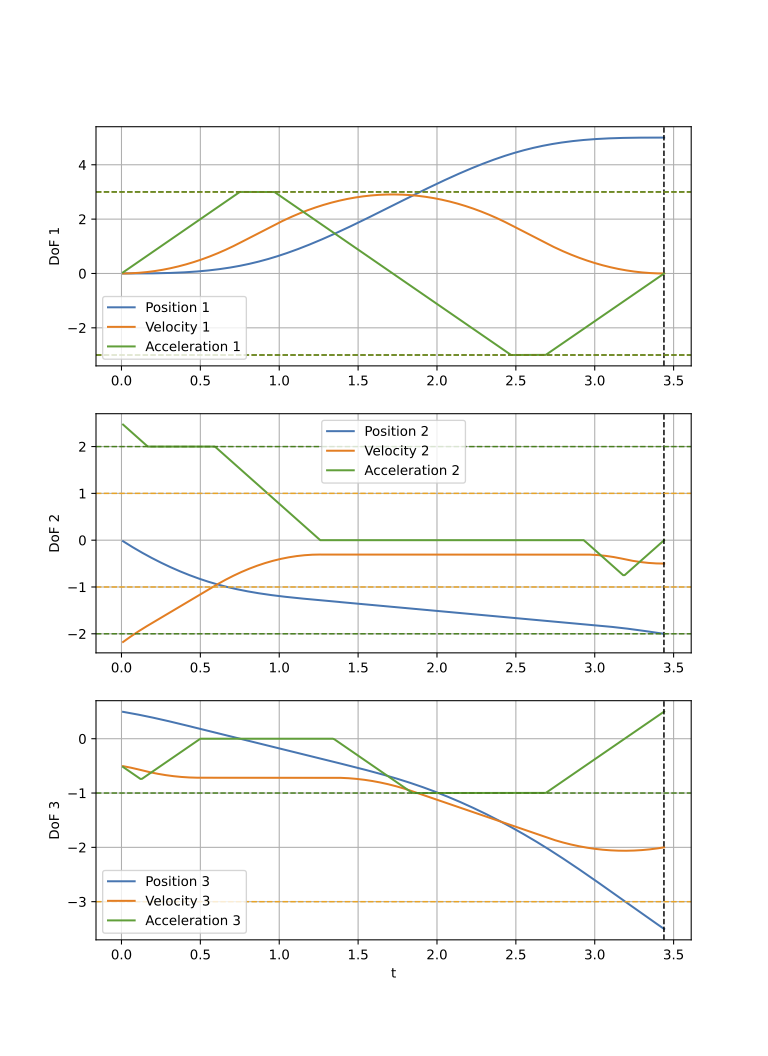
inp.current_position = [0.0, 0.0, 0.5]
inp.current_velocity = [0.0, -2.2, -0.5]
inp.current_acceleration = [0.0, 2.5, -0.5]
inp.target_position = [5.0, -2.0, -3.5]
inp.target_velocity = [0.0, -0.5, -2.0]
inp.target_acceleration = [0.0, 0.0, 0.5]
inp.max_velocity = [3.0, 1.0, 3.0]
inp.max_acceleration = [3.0, 2.0, 1.0]
inp.max_jerk = [4.0, 3.0, 2.0]
print('\t'.join(['t'] + [str(i) for i in range(ruckig.degrees_of_freedom)]))
first_output, out_list = None, []
res = Result.Working
while res == Result.Working:
res = ruckig.update(inp, out)
print('\t'.join([f'{out.time:0.3f}'] + [f'{p:0.3f}' for p in out.new_position]))
out_list.append(copy(out))
out.pass_to_input(inp)
if not first_output:
first_output = copy(out)
print(f'Calculation duration: {first_output.calculation_duration:0.1f} [µs]')
print(f'Trajectory duration: {first_output.trajectory.duration:0.4f} [s]')