from ruckig import InputParameter, Ruckig, Trajectory, Result
if __name__ == '__main__':
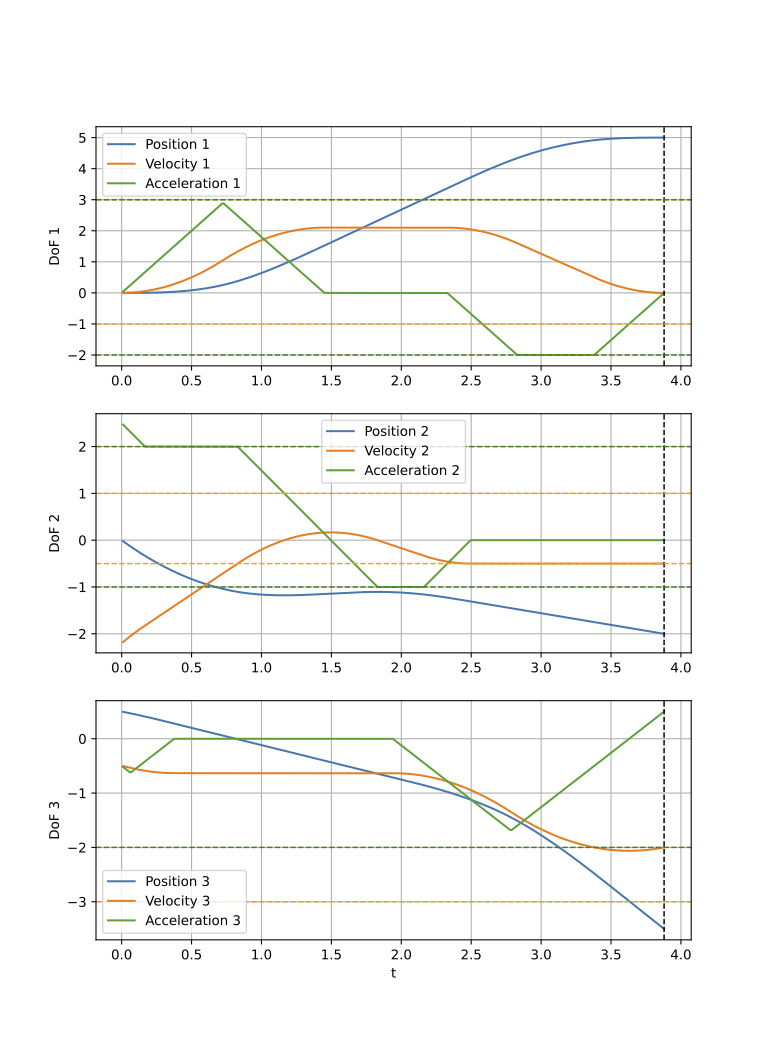
inp = InputParameter(3)
inp.current_position = [0.0, 0.0, 0.5]
inp.current_velocity = [0.0, -2.2, -0.5]
inp.current_acceleration = [0.0, 2.5, -0.5]
inp.target_position = [5.0, -2.0, -3.5]
inp.target_velocity = [0.0, -0.5, -2.0]
inp.target_acceleration = [0.0, 0.0, 0.5]
inp.max_velocity = [3.0, 1.0, 3.0]
inp.max_acceleration = [3.0, 2.0, 1.0]
inp.max_jerk = [4.0, 3.0, 2.0]
inp.min_velocity = [-1.0, -0.5, -3.0]
inp.min_acceleration = [-2.0, -1.0, -2.0]
ruckig = Ruckig(3)
trajectory = Trajectory(3)
result = ruckig.calculate(inp, trajectory)
if result == Result.ErrorInvalidInput:
raise Exception('Invalid input!')
print(f'Trajectory duration: {trajectory.duration:0.4f} [s]')
new_time = 1.0
new_position, new_velocity, new_acceleration = trajectory.at_time(new_time)
print(f'Position at time {new_time:0.4f} [s]: {new_position}')
print(f'Position extremas are {trajectory.position_extrema}')