#include <Eigen/Core>
#include "plotter.hpp"
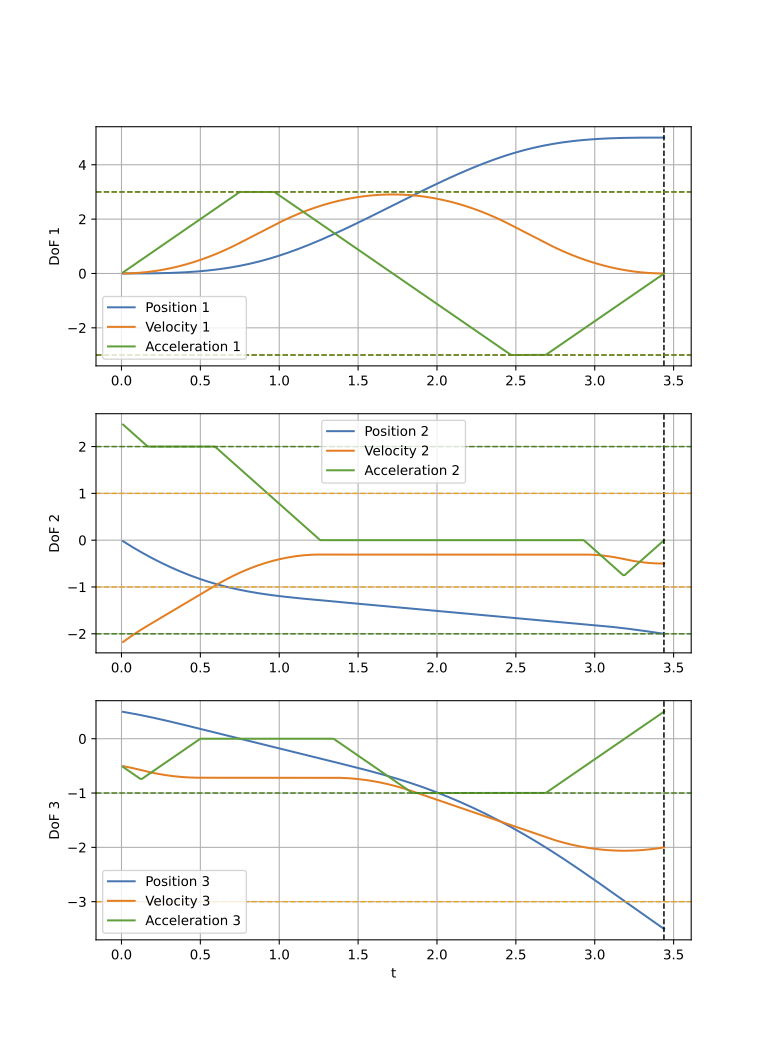
input.current_velocity = {0.0, -2.2, -0.5};
input.current_acceleration = {0.0, 2.5, -0.5};
input.target_velocity = {0.0, -0.5, -2.0};
input.target_acceleration = {0.0, 0.0, 0.5};
input.max_velocity = {3.0, 1.0, 3.0};
input.max_acceleration = {3.0, 2.0, 1.0};
input.max_jerk = {4.0, 3.0, 2.0};
std::cout << "t | position" << std::endl;
}
std::cout <<
"Trajectory duration: " <<
output.trajectory.get_duration() <<
" [s]." << std::endl;
}
Main interface for the Ruckig algorithm.
Definition ruckig.hpp:28