Example 06: Stop Trajectory
C++
#include <ruckig/ruckig.hpp>
#include "plotter.hpp"
using namespace ruckig;
int main() {
// Create instances: the Ruckig trajectory generator as well as input and output parameters
InputParameter<3> input;
OutputParameter<3> output;
// Set input parameters
input.current_position = {0.0, 0.0, 0.5};
input.current_velocity = {0.0, -2.2, -0.5};
input.current_acceleration = {0.0, 2.5, -0.5};
input.target_position = {5.0, -2.0, -3.5};
input.target_velocity = {0.0, -0.5, -2.0};
input.target_acceleration = {0.0, 0.0, 0.5};
input.max_velocity = {3.0, 1.0, 3.0};
input.max_acceleration = {3.0, 2.0, 1.0};
input.max_jerk = {4.0, 3.0, 2.0};
// Generate the trajectory within the control loop
std::cout << "t | position" << std::endl;
bool on_stop_trajectory = false;
while (ruckig.update(input, output) == Result::Working) {
// Activate stop trajectory after 1s
if (output.time >= 1.0 && !on_stop_trajectory) {
std::cout << "Stop immediately." << std::endl;
on_stop_trajectory = true;
// Synchronization is disabled so that each DoF stops as fast as possible independently
input.control_interface = ControlInterface::Velocity;
input.synchronization = Synchronization::None;
input.target_velocity = {0.0, 0.0, 0.0};
input.target_acceleration = {0.0, 0.0, 0.0};
input.max_jerk = {12.0, 10.0, 8.0};
}
output.pass_to_input(input);
}
std::cout << "Stop trajectory duration: " << output.trajectory.get_duration() << " [s]." << std::endl;
}
CustomVector< double, DOFs > target_position
Target (goal) state.
Definition input_parameter.hpp:193
CustomVector< double, DOFs > current_acceleration
Definition input_parameter.hpp:190
CustomVector< double, DOFs > current_velocity
Definition input_parameter.hpp:190
Synchronization synchronization
Synchronization behavior of multiple DoFs.
Definition input_parameter.hpp:181
CustomVector< double, DOFs > max_velocity
Velocity limit.
Definition input_parameter.hpp:196
CustomVector< double, DOFs > current_position
Current (start) state.
Definition input_parameter.hpp:190
CustomVector< double, DOFs > max_jerk
Jerk limit.
Definition input_parameter.hpp:202
CustomVector< double, DOFs > target_velocity
Definition input_parameter.hpp:193
CustomVector< double, DOFs > target_acceleration
Definition input_parameter.hpp:193
CustomVector< double, DOFs > max_acceleration
Acceleration limit.
Definition input_parameter.hpp:199
ControlInterface control_interface
The default position interface controls the full kinematic state.
Definition input_parameter.hpp:178
CustomVector< double, DOFs > new_position
New position values at the given time.
Definition output_parameter.hpp:38
double time
Current time on the trajectory.
Definition output_parameter.hpp:53
void pass_to_input(InputParameter< DOFs, CustomVector > &input) const
Copies the new output state to the current state of the input.
Definition output_parameter.hpp:129
Trajectory< DOFs, CustomVector > trajectory
Current trajectory.
Definition output_parameter.hpp:35
Definition block.hpp:16
std::string pretty_print(const Vector &array)
Join a vector for pretty printing (e.g. to std::cout)
Definition plotter.hpp:11
Python
from copy import copy
from ruckig import InputParameter, OutputParameter, Result, Ruckig, ControlInterface, Synchronization
if __name__ == '__main__':
# Create instances: the Ruckig OTG as well as input and output parameters
otg = Ruckig(3, 0.01) # DoFs, control cycle
inp = InputParameter(3)
out = OutputParameter(3)
inp.current_position = [0.0, 0.0, 0.5]
inp.current_velocity = [0.0, -2.2, -0.5]
inp.current_acceleration = [0.0, 2.5, -0.5]
inp.target_position = [5.0, -2.0, -3.5]
inp.target_velocity = [0.0, -0.5, -2.0]
inp.target_acceleration = [0.0, 0.0, 0.5]
inp.max_velocity = [3.0, 1.0, 3.0]
inp.max_acceleration = [3.0, 2.0, 1.0]
inp.max_jerk = [4.0, 3.0, 2.0]
print('\t'.join(['t'] + [str(i) for i in range(otg.degrees_of_freedom)]))
# Generate the trajectory within the control loop
first_output, out_list, time_offsets = None, [], []
on_stop_trajectory = False
res = Result.Working
while res == Result.Working:
res = otg.update(inp, out)
print('\t'.join([f'{out.time:0.3f}'] + [f'{p:0.3f}' for p in out.new_position]))
out_list.append(copy(out))
time_offsets.append(1.0 if on_stop_trajectory else 0.0)
# Activate stop trajectory after 1s
if out.time >= 1.0 and not on_stop_trajectory:
print('Stop immediately!')
on_stop_trajectory = True
# Synchronization is disabled so that each DoF stops as fast as possible independently
inp.control_interface = ControlInterface.Velocity
inp.synchronization = Synchronization.No
inp.target_velocity = [0.0, 0.0, 0.0]
inp.target_acceleration = [0.0, 0.0, 0.0]
inp.max_jerk = [12.0, 10.0, 8.0]
out.pass_to_input(inp)
if not first_output:
first_output = copy(out)
print(f'Calculation duration: {first_output.calculation_duration:0.1f} [µs]')
print(f'Trajectory duration: {first_output.trajectory.duration:0.4f} [s]')
# Plot the trajectory
# from pathlib import Path
# from plotter import Plotter
# project_path = Path(__file__).parent.parent.absolute()
# Plotter.plot_trajectory(project_path / 'examples' / '06_trajectory.pdf', otg, inp, out_list, plot_jerk=False, time_offsets=time_offsets)
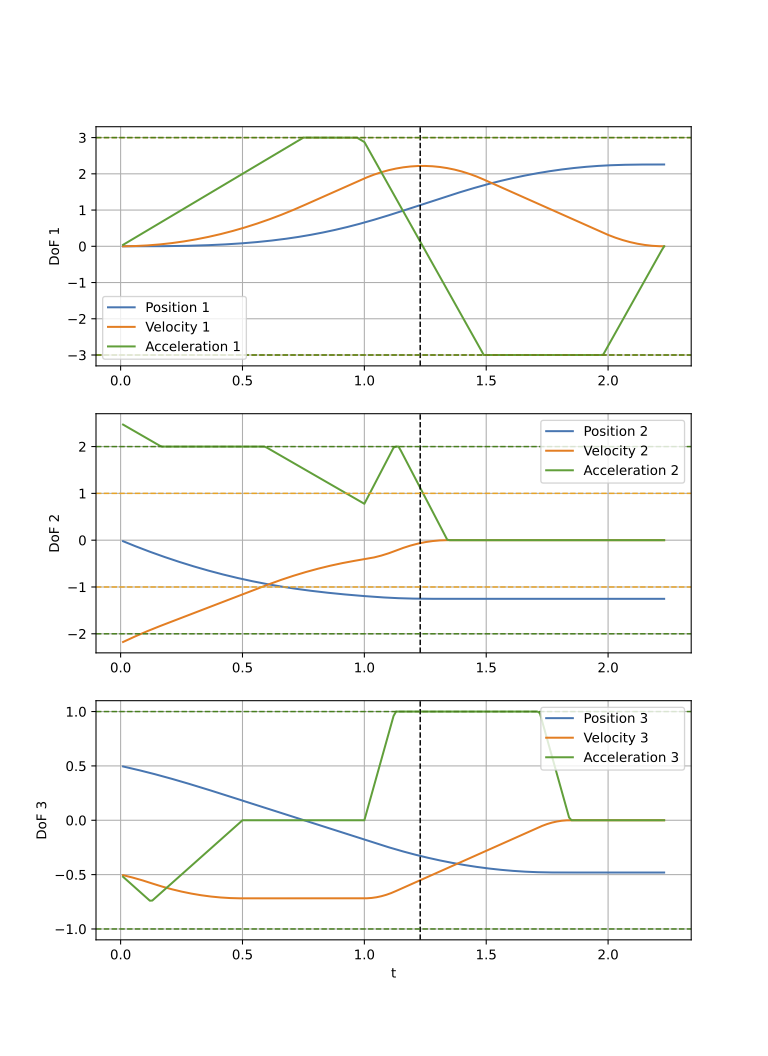
Output Trajectory