Example 10: Dynamic Number of DoFs and Intermediate Waypoints
C++
// This example shows the usage of intermediate waypoints. It will only work with Ruckig Pro or enabled cloud API.
#include <ruckig/ruckig.hpp>
#include "plotter.hpp"
using namespace ruckig;
int main() {
double control_cycle = 0.01;
size_t DOFs = 3;
size_t max_number_of_waypoints = 10; // for memory allocation
// Create instances: the Ruckig trajectory generator as well as input and output parameters
Ruckig<DynamicDOFs> ruckig(DOFs, control_cycle, max_number_of_waypoints);
InputParameter<DynamicDOFs> input(DOFs);
OutputParameter<DynamicDOFs> output(DOFs, max_number_of_waypoints);
// Set input parameters
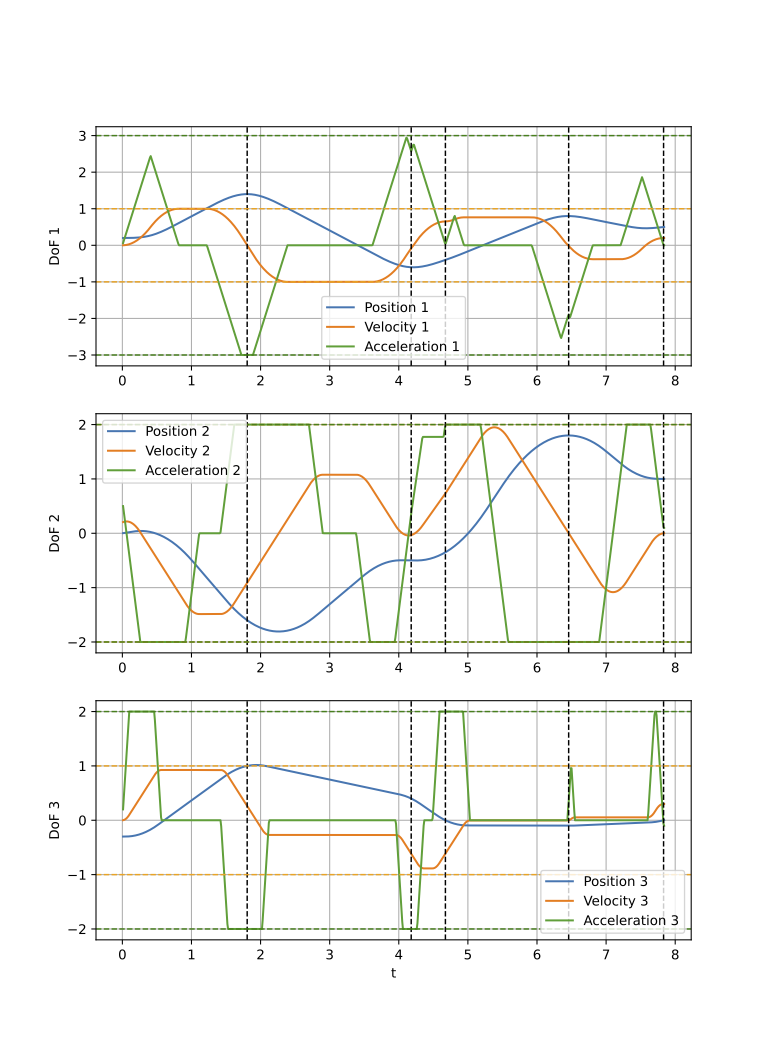
input.current_position = {0.2, 0.0, -0.3};
input.current_velocity = {0.0, 0.2, 0.0};
input.current_acceleration = {0.0, 0.6, 0.0};
input.intermediate_positions = {
{1.4, -1.6, 1.0},
{-0.6, -0.5, 0.4},
{-0.4, -0.35, 0.0},
{0.8, 1.8, -0.1}
};
input.target_position = {0.5, 1.0, 0.0};
input.target_velocity = {0.2, 0.0, 0.3};
input.target_acceleration = {0.0, 0.1, -0.1};
input.max_velocity = {1.0, 2.0, 1.0};
input.max_acceleration = {3.0, 2.0, 2.0};
input.max_jerk = {6.0, 10.0, 20.0};
std::cout << "t | position" << std::endl;
double calculation_duration = 0.0;
while (ruckig.update(input, output) == Result::Working) {
std::cout << output.time << " | " << pretty_print(output.new_position) << std::endl;
output.pass_to_input(input);
if (output.new_calculation) {
calculation_duration = output.calculation_duration;
}
}
std::cout << "Reached target position in " << output.trajectory.get_duration() << " [s]." << std::endl;
std::cout << "Calculation in " << calculation_duration << " [µs]." << std::endl;
}
Definition block.hpp:16
std::string pretty_print(const Vector &array)
Join a vector for pretty printing (e.g. to std::cout)
Definition plotter.hpp:11
Python
# ---
#
# Nothing to see here, as the Python version *always* uses a dynamic number of degrees of freedom.
#
# ---
Output Trajectory