Example 13: Custom Vector Type with Dynamic DoFs
C++
#include <deque>
#include <ruckig/ruckig.hpp>
#include "plotter.hpp"
template<class T, size_t DOFs>
class MinimalDynamicDofsVector {
std::deque<T> data;
public:
MinimalDynamicDofsVector() { }
MinimalDynamicDofsVector(std::initializer_list<T> a) {
data.resize(a.size());
std::copy_n(a.begin(), a.size(), std::begin(data));
}
T operator[](size_t i) const {
return data[i];
}
T& operator[](size_t i) {
return data[i];
}
size_t size() const {
return data.size();
}
void resize(size_t size) {
data.resize(size);
}
bool operator==(const MinimalDynamicDofsVector<T, DOFs>& rhs) const {
for (size_t dof = 0; dof < data.size(); ++dof) {
if (data[dof] != rhs[dof]) {
return false;
}
}
return true;
}
};
using namespace ruckig;
int main() {
// Create instances: the Ruckig trajectory generator as well as input and output parameters
// Set input parameters
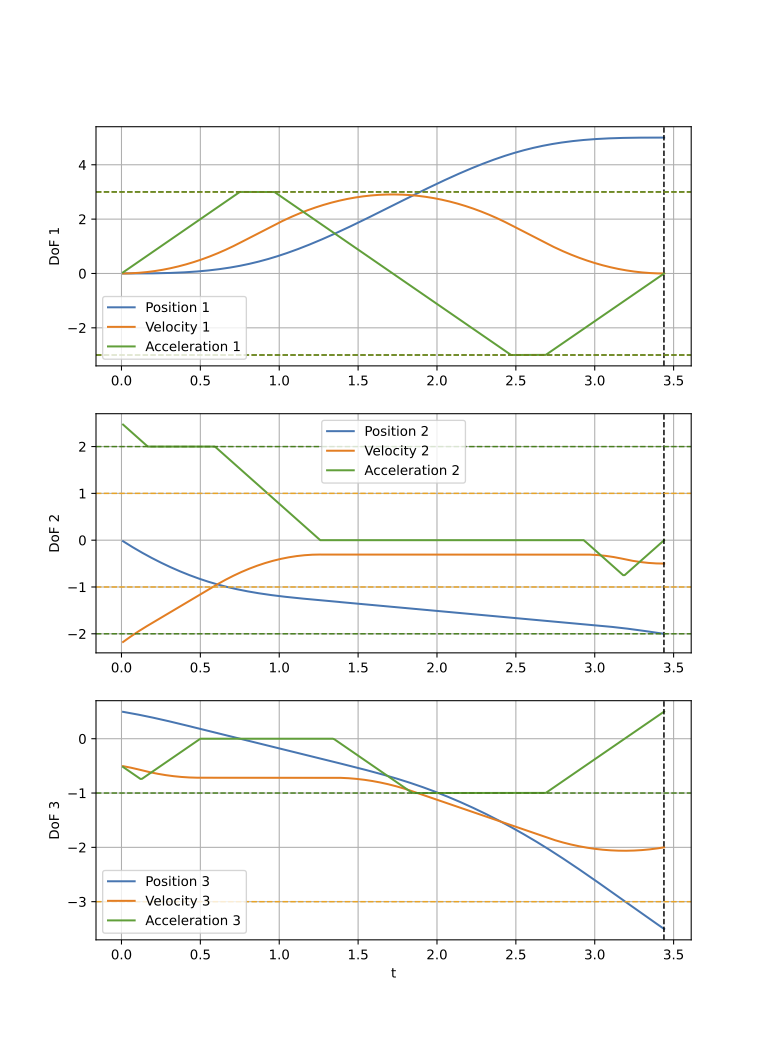
input.current_position = {0.0, 0.0, 0.5};
input.current_velocity = {0.0, -2.2, -0.5};
input.current_acceleration = {0.0, 2.5, -0.5};
input.target_position = {5.0, -2.0, -3.5};
input.target_velocity = {0.0, -0.5, -2.0};
input.target_acceleration = {0.0, 0.0, 0.5};
input.max_velocity = {3.0, 1.0, 3.0};
input.max_acceleration = {3.0, 2.0, 1.0};
input.max_jerk = {4.0, 3.0, 2.0};
// Generate the trajectory within the control loop
std::cout << "t | position" << std::endl;
while (ruckig.update(input, output) == Result::Working) {
std::cout << output.time << " | " << pretty_print(output.new_position) << std::endl;
output.pass_to_input(input);
}
std::cout << "Trajectory duration: " << output.trajectory.get_duration() << " [s]." << std::endl;
}
Definition block.hpp:16
std::string pretty_print(const Vector &array)
Join a vector for pretty printing (e.g. to std::cout)
Definition plotter.hpp:11
Python
# ---
#
# Nothing to see here, as the custom vector types don't affect the Python version.
#
# ---
Output Trajectory