Example 02: Offline Trajectory Generation
C++
#include <ruckig/ruckig.hpp>
#include "plotter.hpp"
using namespace ruckig;
int main() {
// Create input parameters
InputParameter<3> input;
input.current_position = {0.0, 0.0, 0.5};
input.current_velocity = {0.0, -2.2, -0.5};
input.current_acceleration = {0.0, 2.5, -0.5};
input.target_position = {5.0, -2.0, -3.5};
input.target_velocity = {0.0, -0.5, -2.0};
input.target_acceleration = {0.0, 0.0, 0.5};
input.max_velocity = {3.0, 1.0, 3.0};
input.max_acceleration = {3.0, 2.0, 1.0};
input.max_jerk = {4.0, 3.0, 2.0};
// Set different constraints for negative direction
input.min_velocity = {-2.0, -0.5, -3.0};
input.min_acceleration = {-2.0, -2.0, -2.0};
// We don't need to pass the control rate (cycle time) when using only offline features
Trajectory<3> trajectory;
// Calculate the trajectory in an offline manner (outside of the control loop)
if (result == Result::ErrorInvalidInput) {
std::cout << "Invalid input!" << std::endl;
return -1;
}
// Get duration of the trajectory
std::cout << "Trajectory duration: " << trajectory.get_duration() << " [s]." << std::endl;
double new_time = 1.0;
// Then, we can calculate the kinematic state at a given time
std::array<double, 3> new_position, new_velocity, new_acceleration;
trajectory.at_time(new_time, new_position, new_velocity, new_acceleration);
std::cout << "Position at time " << new_time << " [s]: " << pretty_print(new_position) << std::endl;
// Get some info about the position extrema of the trajectory
std::array<Bound, 3> position_extrema = trajectory.get_position_extrema();
std::cout << "Position extremas for DoF 4 are " << position_extrema[2].min << " (min) to " << position_extrema[2].max << " (max)" << std::endl;
}
CustomVector< double, DOFs > target_position
Target (goal) state.
Definition input_parameter.hpp:193
CustomVector< double, DOFs > current_acceleration
Definition input_parameter.hpp:190
CustomVector< double, DOFs > current_velocity
Definition input_parameter.hpp:190
CustomVector< double, DOFs > max_velocity
Velocity limit.
Definition input_parameter.hpp:196
CustomVector< double, DOFs > current_position
Current (start) state.
Definition input_parameter.hpp:190
CustomVector< double, DOFs > max_jerk
Jerk limit.
Definition input_parameter.hpp:202
CustomVector< double, DOFs > target_velocity
Definition input_parameter.hpp:193
std::optional< CustomVector< double, DOFs > > min_acceleration
Minimum acceleration limit. If none is given, the negative maximum acceleration limit is used.
Definition input_parameter.hpp:208
std::optional< CustomVector< double, DOFs > > min_velocity
Minimum velocity limit. If none is given, the negative maximum velocity limit is used.
Definition input_parameter.hpp:205
CustomVector< double, DOFs > target_acceleration
Definition input_parameter.hpp:193
CustomVector< double, DOFs > max_acceleration
Acceleration limit.
Definition input_parameter.hpp:199
Definition block.hpp:16
Result
Result type of methods calculating trajectories (e.g. Ruckig's and Trackig's update and calculate)
Definition result.hpp:7
std::string pretty_print(const Vector &array)
Join a vector for pretty printing (e.g. to std::cout)
Definition plotter.hpp:11
Python
from ruckig import InputParameter, Ruckig, Trajectory, Result
if __name__ == '__main__':
inp = InputParameter(3)
inp.current_position = [0.0, 0.0, 0.5]
inp.current_velocity = [0.0, -2.2, -0.5]
inp.current_acceleration = [0.0, 2.5, -0.5]
inp.target_position = [5.0, -2.0, -3.5]
inp.target_velocity = [0.0, -0.5, -2.0]
inp.target_acceleration = [0.0, 0.0, 0.5]
inp.max_velocity = [3.0, 1.0, 3.0]
inp.max_acceleration = [3.0, 2.0, 1.0]
inp.max_jerk = [4.0, 3.0, 2.0]
# Set different constraints for negative direction
inp.min_velocity = [-1.0, -0.5, -3.0]
inp.min_acceleration = [-2.0, -1.0, -2.0]
# We don't need to pass the control rate (cycle time) when using only offline features
otg = Ruckig(3)
trajectory = Trajectory(3)
# Calculate the trajectory in an offline manner
result = otg.calculate(inp, trajectory)
if result == Result.ErrorInvalidInput:
raise Exception('Invalid input!')
print(f'Trajectory duration: {trajectory.duration:0.4f} [s]')
new_time = 1.0
# Then, we can calculate the kinematic state at a given time
new_position, new_velocity, new_acceleration = trajectory.at_time(new_time)
print(f'Position at time {new_time:0.4f} [s]: {new_position}')
# Get some info about the position extrema of the trajectory
print(f'Position extremas are {trajectory.position_extrema}')
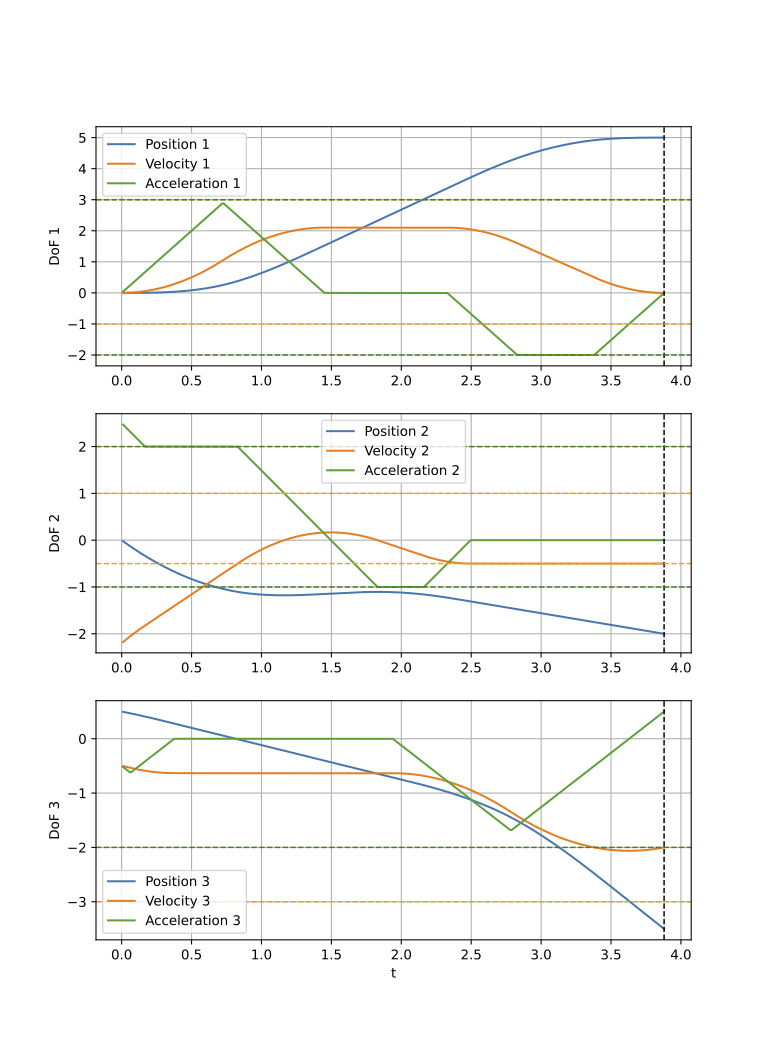
Output Trajectory